

ティム・クック氏は以前、アップルの自律システムに関する作業について公然とコメントしており、2人のアップルの研究者からの新しい研究論文が同社の取り組みに深く関わっています。このホワイトペーパーでは、Appleが将来を表す3Dオブジェクト検出のためにLiDARと他のテクノロジーをどのように組み合わせて使用しているかについて説明します。
この論文は、アップルのAI研究者であるYin Zhou氏と、同社の機械学習研究者であるOncel Tuzel氏が執筆したものです。両方とも、ここ2年以内にAppleに加わった。
この論文では、自律航法、ハウスキーピングロボットなどで3D点群のオブジェクトを正確に検出する方法を説明しています。
自律航法、ハウスキーピングロボット、拡張された/バーチャルリアリティなど、多くのアプリケーションで3D点群のオブジェクトを正確に検出することが中心的な問題です。高度に疎なLiDARポイントクラウドと地域提案ネットワーク(RPN)とをインターフェースするために、ほとんどの既存の取り組みは、例えば鳥瞰図投影などの手作業によるフィーチャ表現に焦点を当ててきた。
この作業では、3Dポイントクラウドの手作業によるフィーチャエンジニアリングの必要性を排除し、フィーチャ抽出とバウンディングボックスの予測をエンドツーエンドの訓練可能な深いネットワークに統合する一般的な3D検出ネットワークであるVoxelNetを提案します。
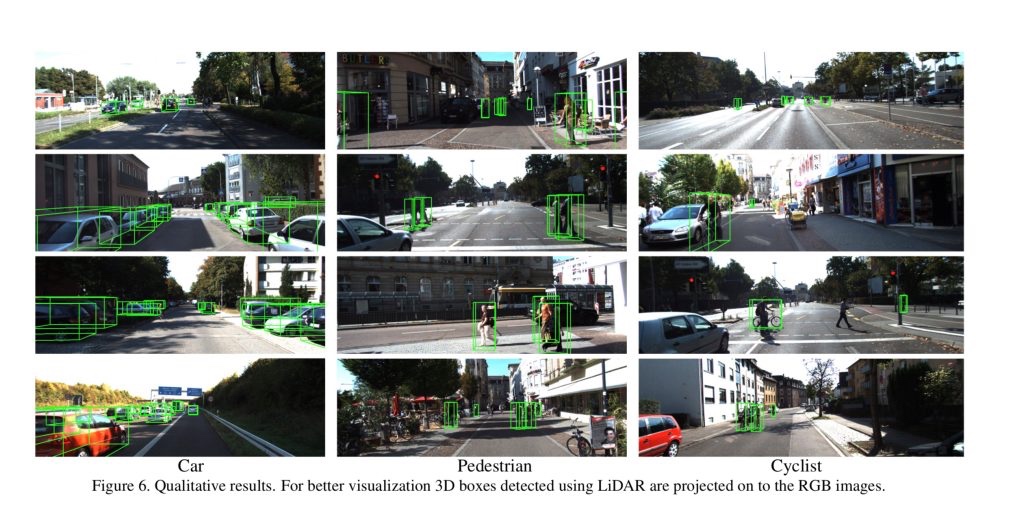
さらに、LiDARベースの車、歩行者、自転車の検出ベンチマークで、前述の技術をどのように使用できるかを示しています。具体的には、LiDARベースの3D検出での手作業によるフィーチャ表現の代替方法を示しています。
LiDARベースの3D検出における既存の方法のほとんどは、手作業による特徴表現、例えば鳥瞰図投影に頼っている。本稿では、手動フィーチャ工学のボトルネックを解消し、ポイントクラウドベースの3D検出のための新しいエンドツーエンドの訓練可能な深いアーキテクチャであるVoxelNetを提案している。
私たちのアプローチは、まばらな3Dポイントで直接操作し、効果的に3D形状情報を取得することができます。また、点群の希薄化とボクセルグリッド上での並列処理の恩恵を受けるVoxelNetの効率的な実装についても説明します。
ZhouとTuzelは、彼らの実験が3D物体検出の未来を表し、自動車、サイクリスト、および歩行者を「大きなマージンで」検出する際の他の技術よりも優れた結果をもたらすと信じています。
KITTI車の検出タスクに関する実験では、VoxelNetが最先端のLiDARベースの3D検出方法を大幅に上回ることがわかりました。歩行者やサイクリストの3D検出など、より困難な作業では、VoxelNetはより良い3D表現を提供することを示唆しています
完全な論文は、読んだだけの価値があり、Appleの自律システムに関する作業についてはまれな洞察を提供しています。






のマイニング方法")




