

テスラのオートパイロットは、すでに顧客の所有する車両の機能に力を入れているので、最も有名で、間違いなく最もエキサイティングなものです。良いか悪いかに関わらず、人々はそれをいくつかの面で試してみることができ、その実験を通じて、Autopilotのデバッグモードを見て、テスラの半自律システムのバックエンドについての洞察を得ることができます。
テスラの第2世代オートパイロットは非常に複雑ですが、手短に言えば、テスラビジョンと呼ばれるコンピュータビジョン技術で構成されています。テスラビジョンは、車両周辺の8台のカメラ(現在は主に3台のフロントカメラ)からの画像を使用して、 GPSとレーダーデータの比較。
Teslaは、データ全体を収集して「高精度マップ」を構築しており、その車両はその位置に基づいて「タイル」をダウンロードし、より自律的に操縦するために使用することができます。
自動操縦は、いつでも、これらの技術の1つまたはそれらの融合を利用して動作させる。テスラビジョンシステムでは、先行車を使用したり、操縦するために車線マークを検出することもできます。
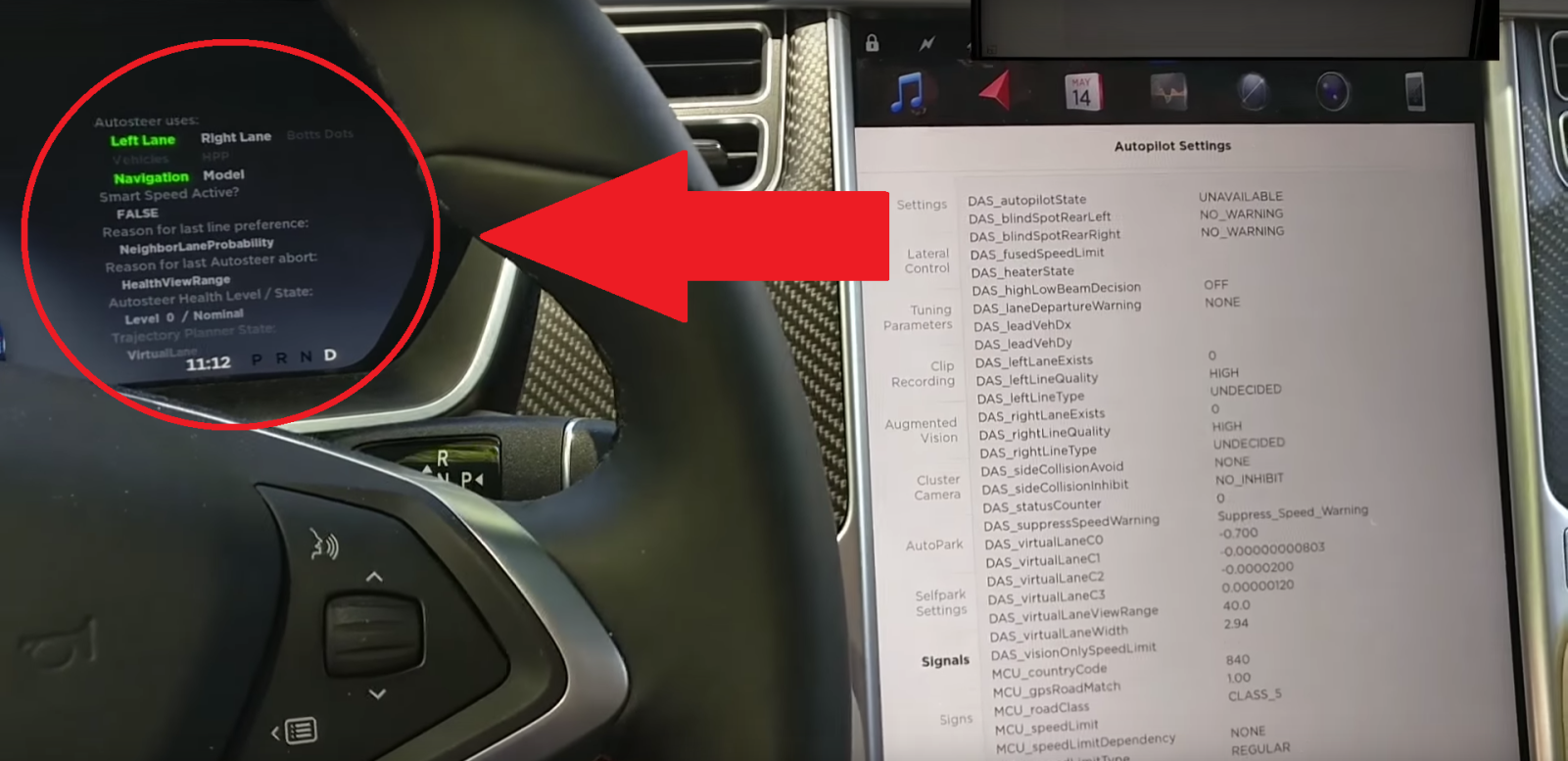
Teslaのオートパイロットデバッグモードは、Tesla Motors Clubのメンバーである「非常に緑色」がハックして、システムが決定を下すために使用している測定基準のうちのどれを正確に示しているかを示します。
APデバッグ1
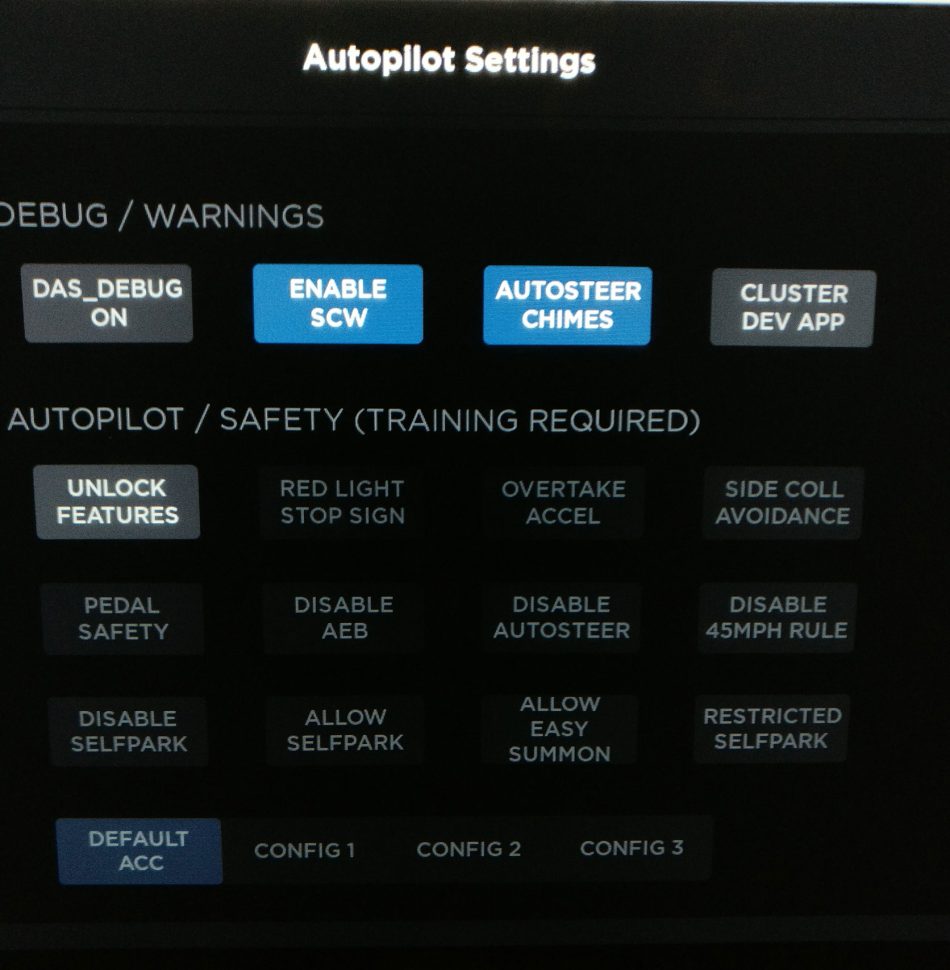
もちろん、「Augmented Vision」は、特にヘッドアップディスプレイに関するすべての話の後で、誰もが注目を集めましたが、タブのオプションでは、verygreenは「ある種のビデオフィードを表示する」べきだと指摘したが、は自分の車で動作させることはできなかった。
テスラの所有者が車両をハッキングしているという報告に以前触れたように、テスラはすべての車両にプッシュするソフトウェアビルドを1つ持っています。たとえば、テスラの開発車両は、非常に緑色のものと同じソフトウェアビルドを持つことができますが、デバッグモードで表示されている機能にアクセスできます。
デバッグモードで運転するとき、GPSデータやマップタイルのようにオートパイロットが使用している情報をリアルタイムで見ることができます。





のマイニング方法")




